中文
ENG
首页
关于我们
公司介绍
集成能力
资质荣誉
联系我们
产品中心
视觉软件
德国TIS工业相机
TE传感器
智能相机(读码器)及光电传感器
解决方案
机器人视觉应用
缺陷检测
尺寸测量
其他
典型案例
晶圆缺陷检测
硫化橡胶制品检测
锂电行业铝片缺陷检测
槟榔切片分选
0BB点胶检测
合作伙伴
合作伙伴
新闻资讯
公司动态
行业资讯
联系我们
解决方案
机器人视觉应用
缺陷检测
尺寸测量
其他
首页
>
解决方案
> 机器人视觉应用
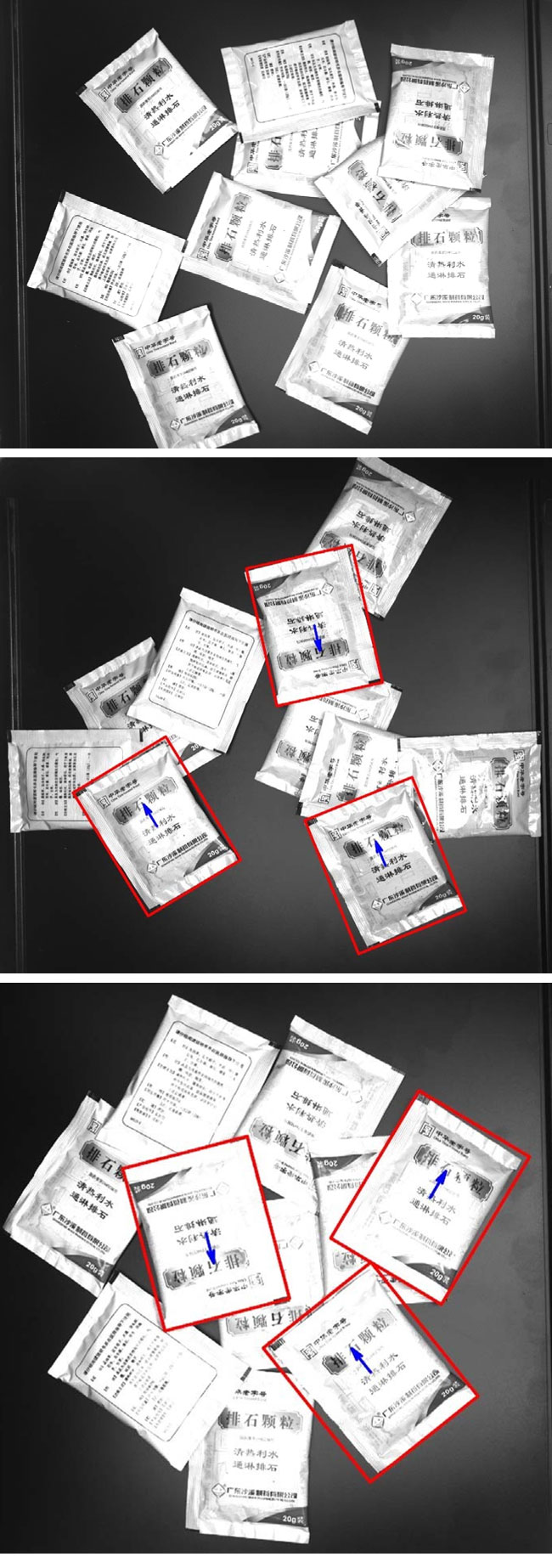
堆叠物料抓取方案
定位要求:
(1)分割出可供吸取的多个工件并区分正反面
(2)计算每个工件的角度和坐标信息
(3)每次拍照发送一个识别度最高的工件,机器人带吸嘴过来进行吸取
(4)每次吸取完成之后,再次拍照,依次循环。
总结:
基于深度学习算法及对应的硬件系统,我司定位系统可对无序堆叠的冲剂颗粒袋进行定位,并规避传统算法易出现的误判问题,实现高效抓取。
 中文
中文 ENG
ENG