中文
ENG
首页
关于我们
公司介绍
集成能力
资质荣誉
联系我们
产品中心
视觉软件
德国TIS工业相机
TE传感器
智能相机(读码器)及光电传感器
解决方案
机器人视觉应用
缺陷检测
尺寸测量
其他
典型案例
晶圆缺陷检测
硫化橡胶制品检测
锂电行业铝片缺陷检测
槟榔切片分选
0BB点胶检测
合作伙伴
合作伙伴
新闻资讯
公司动态
行业资讯
联系我们
解决方案
机器人视觉应用
缺陷检测
尺寸测量
其他
首页
>
解决方案
> 机器人视觉应用
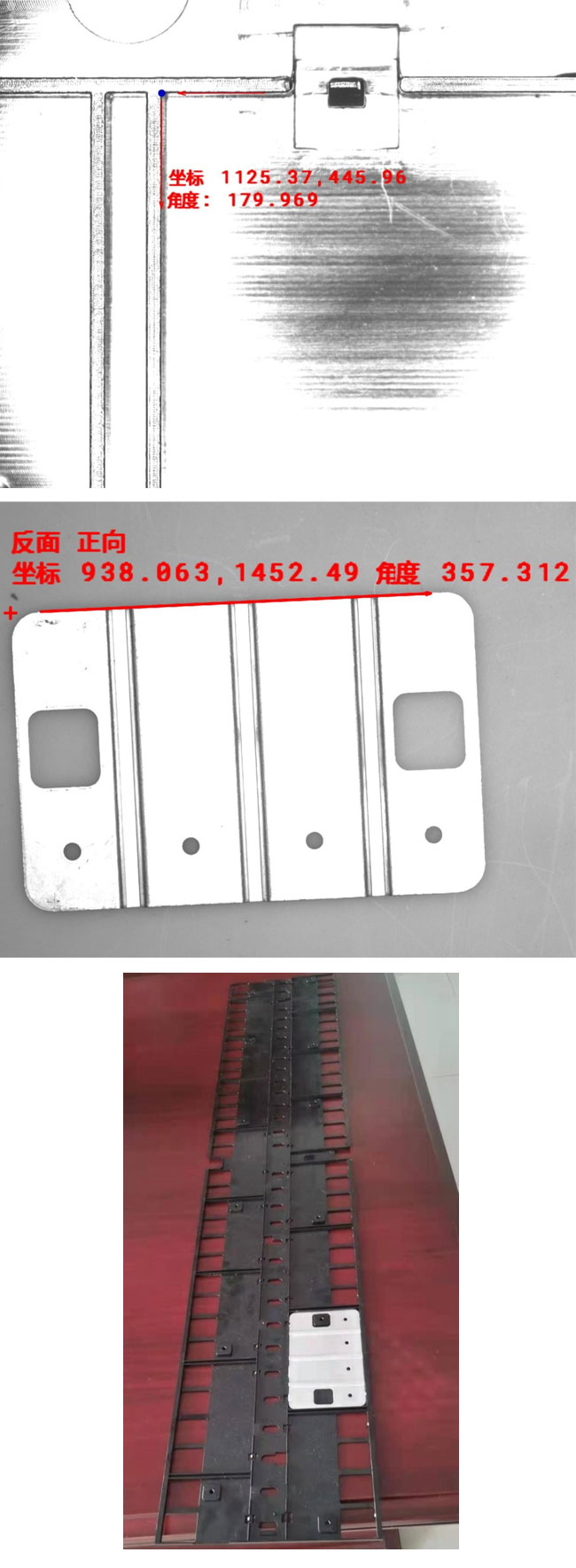
铝排放料方案
项目信息:
(1)视觉要求精度为0.1mm
(2)节拍为140S/30个,包含机器人运动时间。
总结:
机器人取料后,CCD对底框进行拍照,工件边缘会有毛刺变形等干扰因素,使用优化后的匹配算法,在使用平面相机的情况下能够快速且高效的匹配到边缘,我司检测系统可以准确获取到放料位的底框坐标、偏移角度信息,且可以达到方案所需的节拍及精度需求。
 中文
中文 ENG
ENG