Stacked material grabbing plan
Positioning requirements:
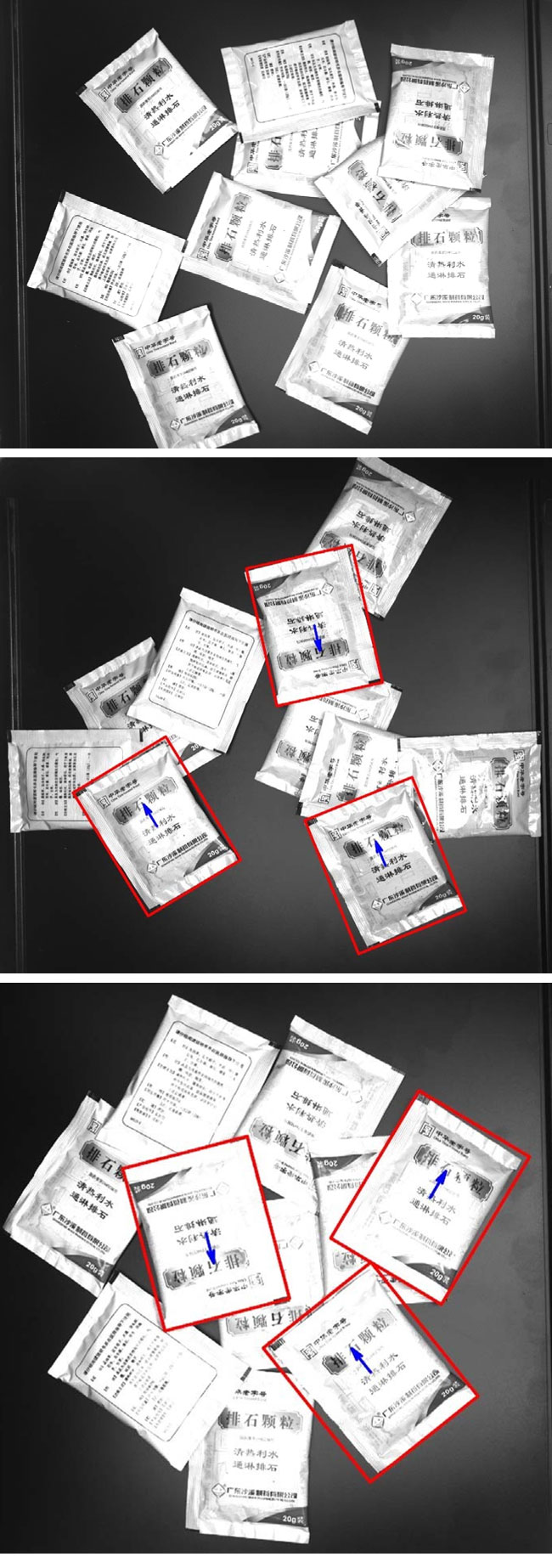
(1) Divide multiple workpieces available for suction and distinguish the front and back sides
(2) Calculate the angle and coordinate information for each workpiece
(3) Each time a photo is taken and a workpiece with the highest recognition is sent, the robot comes with a suction nozzle for suction
(4) After each suction is completed, take another photo and cycle through the process.
Summary: Based on deep learning algorithms and corresponding hardware systems, our positioning system can locate unordered stacked granule bags of granules and avoid the misjudgment problem that traditional algorithms are prone to, achieving efficient grasping.

 中文
中文 ENG
ENG