Project information:
(1) Visual requirement accuracy of 0.1mm
(2) The rhythm is 140S/30, including the robot's movement time.
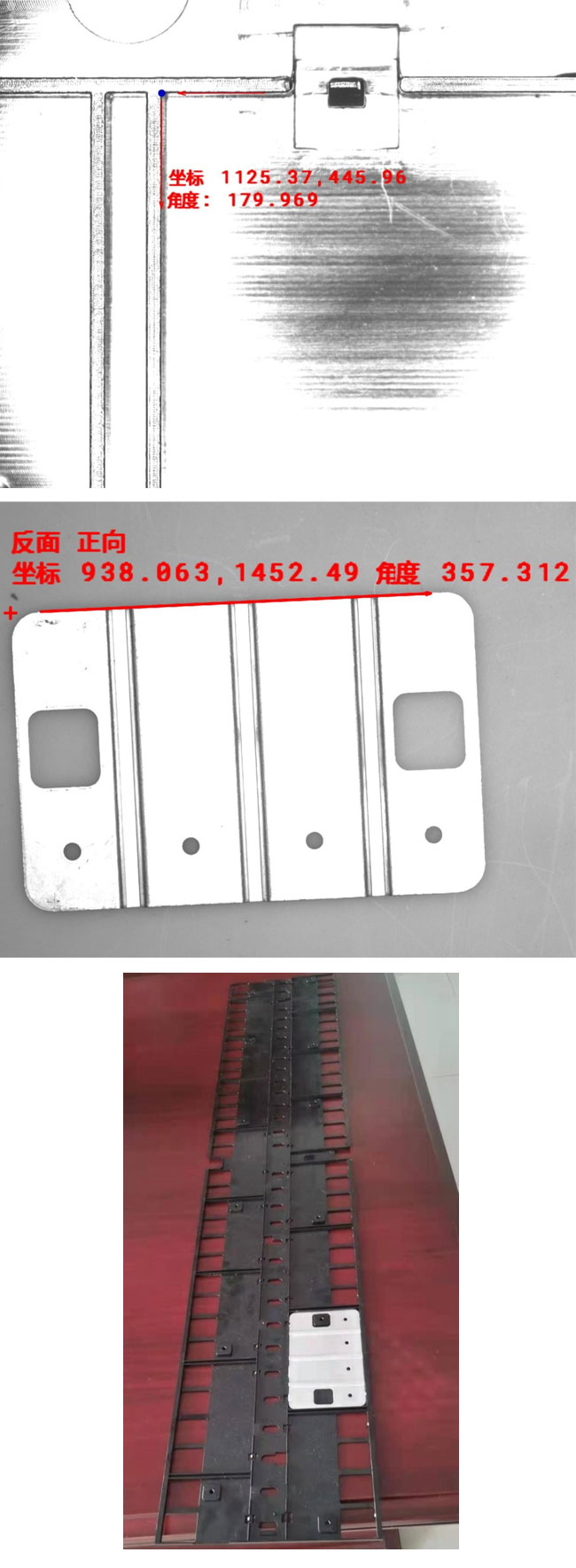
Summary: After the robot picks up the material, the CCD takes photos of the bottom frame, and there may be interference factors such as burrs and deformation at the edges of the workpiece. By using an optimized matching algorithm, the edge can be quickly and efficiently matched with a flat camera. Our detection system can accurately obtain the bottom frame coordinates and offset angle information of the material placement position, and can meet the required rhythm and accuracy requirements of the plan.

 中文
中文 ENG
ENG